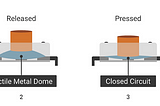
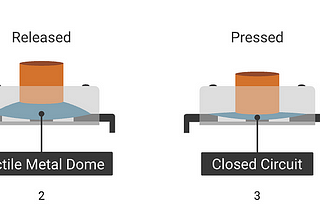
YunggerMicroPython 如此簡單: 按鍵開關 (Button Switch)按鍵開關應該算是創客們在開發作品時, 最常用到且不可或缺的小元件, 但要簡單且精準地用它來控制周邊, 則要看每個人開發程式的功力而有所差異了。因此, 寫了這麼一個小小函式庫, 專門來處理這個常用的裝置控制元件, 讓一切的複雜性從此消失。7 min read·Dec 8, 2023----
YunggerMicroPython 如此簡單: 伺服馬達(Servo)以下介紹的函式庫可以提供創客們最常用須控制的零件 — Servo 舵機, 用簡單直覺的方式, 用同樣的方式來控制各種 180度與 360度的舵機.4 min read·Nov 21, 2023----
YunggerMicroPython 如此簡單: LED WS2812b (NeoPixel)一個簡單到不行的 MicroPython 控制 WS2812b 的 NeoPixel 函式庫, 現在就開始試試.4 min read·Nov 21, 2023----
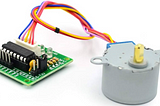
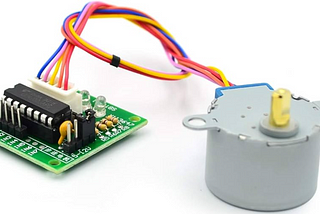
YunggerMicroPython 如此簡單: ULN2003 步進馬達模組一個讓控制步進馬達變得非常簡單的 ULN2003 的 MicroPython 函式庫.3 min read·Nov 18, 2023----
YunggerMicroPython 如此簡單: WiFi 智慧連網一個簡單快速的 Wifi 連網方式的 MicroPython 函式庫, 且能智慧地連上訊號最強的網路, 並能偵測斷線後自動再連網.3 min read·Nov 18, 2023----
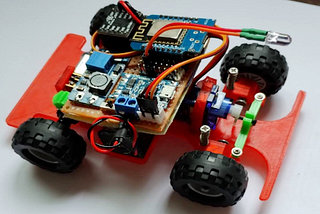
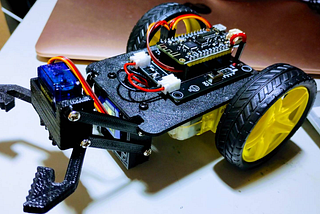
YunggerMicroPython 專案: MQTT 競速小車今天拿之前上課中的微型競速車改裝, 直接將 “MicroPython 專案: MQTT 搬運車” 專案的設定檔與在主程式中接收 MQTT Client 的指令稍微調整了一下 (簡單的把調速與轉向的控制邏輯加入), 來展示使用 MicroPython 如此簡單系列所介紹的元件…4 min read·Oct 24, 2022----
YunggerMicroPython 專案: TCP/IP 搬運車一個延伸 “MicroPython 專案: MQTT 搬運車” 專案的實作, 用來說明與展示使用 MicroPython 如此簡單系列所介紹的元件, 以組合方式來達成 Low Code, No Code 的開發是如何的簡潔與快速建置。4 min read·Oct 16, 2022----
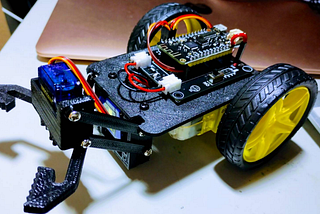
YunggerMicroPython 專案: MQTT 搬運車前陣子心血來潮寫了一些文章, 取名為 MicroPython 如此簡單系列, 近來想想似乎覺得這名字取得好像很容易讓人誤解, 畢竟在 Maker 世界裡, Arduino 的開發者才算是大宗, 加上隨手可得的套件, 全部不用自己寫, 尤其國外一堆大神早早就寫好程式碼…4 min read·Oct 16, 2022----
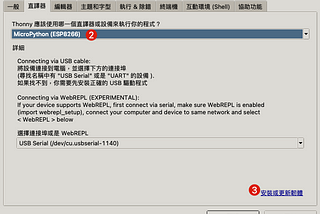
YunggerMicroPython 如此簡單: 檔案管理 (使用 Thonny)本文將說明如何以 Thonny IDE 做為本機與MCU彼此間對 MicroPython 的程式的編輯, 執行, 上傳, 下載, 與刪除。3 min read·May 30, 2022----